c4dynamics.states.lib.rigidbody.rigidbody.I#
- property rigidbody.I#
Gets and sets the array of moments of inertia.
\[I = [I_{xx}, I_{yy}, I_{zz}]\]Default: \(I = [0, 0, 0]\)
- Parameters:
I (numpy.array or list) – An array of three moments of inertia about each one of the axes \(([I_{xx}, I_{yy}, I_{zz}])\).
- Returns:
out (numpy.array) – An array of the three moments of inertia \([I_{xx}, I_{yy}, I_{zz}]\).
Example
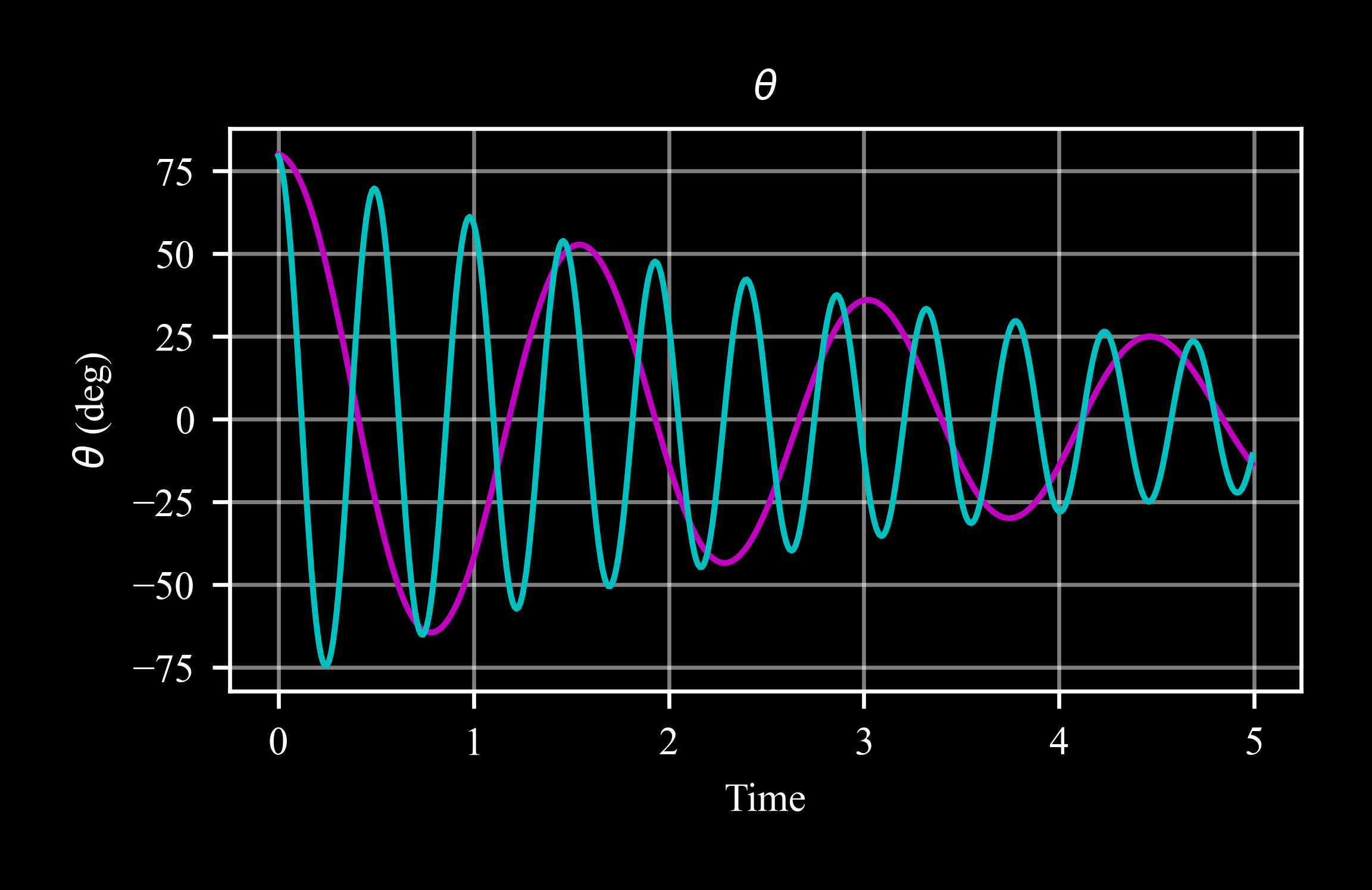
The moment of inertia determines how much torque is required for a desired angular acceleration about a rotational axis.
In this example, two physical pendulums with the same initial conditions show the effect of different moments of inertia on the time period of an oscillation:
\[T = 2 \cdot \pi \cdot \sqrt{{I \over m \cdot g \cdot l}}\]where here \(m\) is the mass \(m = 1\), \(l\) is the length from the center of mass \(l = 1\), \(g\) is the gravity acceleration, and \(I\) is the moment of inertia about \(y\), \(I_{yy1} = 0.5, I_{yy2} = 0.05\)
Import required packages:
>>> import c4dynamics as c4d >>> from matplotlib import pyplot as plt >>> from scipy.integrate import odeint >>> import numpy as np
Settings and initial condtions:
>>> b = 0.5 >>> dt = 0.01 >>> g = c4d.g_ms2 >>> theta0 = 80 * c4d.d2r >>> rb05 = c4d.rigidbody(theta = theta0) >>> rb05.I = [0, .5, 0] >>> rb005 = c4d.rigidbody(theta = theta0) >>> rb005.I = [0, .05, 0]
Physical pendulum dynamics:
>>> def pendulum(yin, t, Iyy): ... theta, q = yin[7], yin[10] ... yout = np.zeros(12) ... yout[7] = q ... yout[10] = -g * c4d.sin(theta) / Iyy - b * q ... return yout
Main loop
>>> for ti in np.arange(0, 5, dt): ... # Iyy = 0.5 ... rb05.X = odeint(pendulum, rb05.X, [ti, ti + dt], (rb05.I[1],))[1] ... rb05.store(ti) ... # Iyy = 0.05 ... rb005.X = odeint(pendulum, rb005.X, [ti, ti + dt], (rb005.I[1],))[1] ... rb005.store(ti)
Plot results:
>>> rb05.plot('theta') >>> rb005.plot('theta', ax = plt.gca(), color = 'c')