c4dynamics.states.state.state.plot#
- state.plot(var, scale=1, ax=None, filename=None, darkmode=True, block=False, **kwargs)[source]#
Draws plots of variable evolution over time.
This method plots the evolution of a state variable over time. The resulting plot can be saved to a directory if specified.
- Parameters:
var (str) – The name of the variable or parameter to be plotted.
scale (float or int, optional) – A scaling factor to apply to the variable values. Defaults to 1.
ax (matplotlib.axes.Axes, optional) – An existing Matplotlib axis to plot on. If None, a new figure and axis will be created, by default None.
filename (str, optional) – Full file name to save the plot image. If None, the plot will not be saved, by default None.
darkmode (bool, optional) – Directory path to save the plot image. If None, the plot will not be saved, by default None.
**kwargs (dict, optional) – Additional key-value arguments passed to matplotlib.pyplot.plot. These can include any keyword arguments accepted by plot, such as color, linestyle, marker, etc.
- Returns:
ax (matplotlib.axes.Axes.) – Matplotlib axis of the derived plot.
Note
The default color is set to ‘m’ (magenta).
The default linewidth is set to 1.2.
Examples
Import required packages:
>>> import c4dynamics as c4d >>> from matplotlib import pyplot as plt >>> import numpy as np
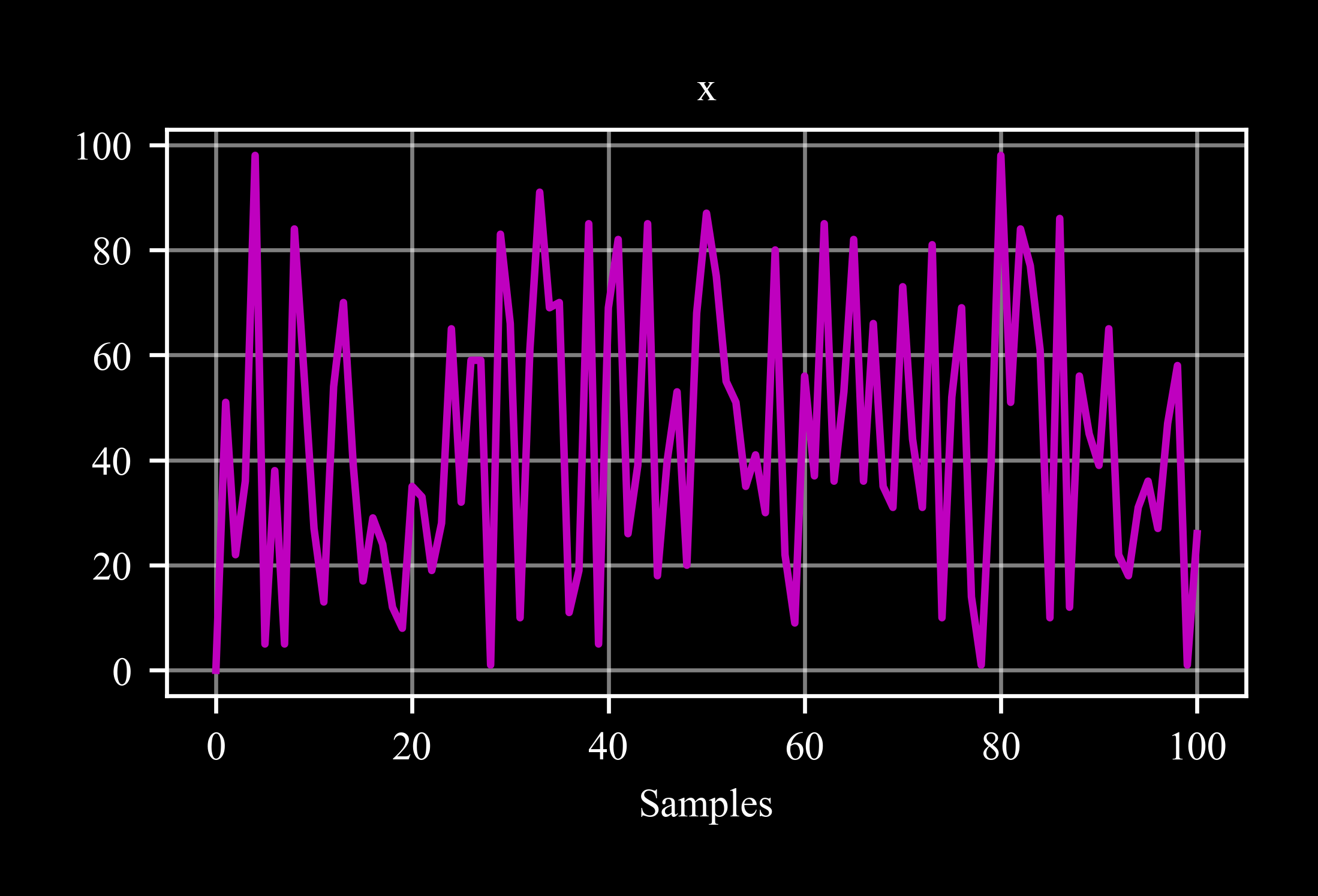
Plot an arbitrary state variable and save:
>>> s = c4d.state(x = 0, y = 0) >>> s.store() >>> for _ in range(100): ... s.x = np.random.randint(0, 100, 1) ... s.store() >>> s.plot('x', filename = 'x.png') >>> plt.show()
Interactive mode:
>>> plt.switch_backend('TkAgg') >>> s.plot('x') >>> plt.show(block = True)
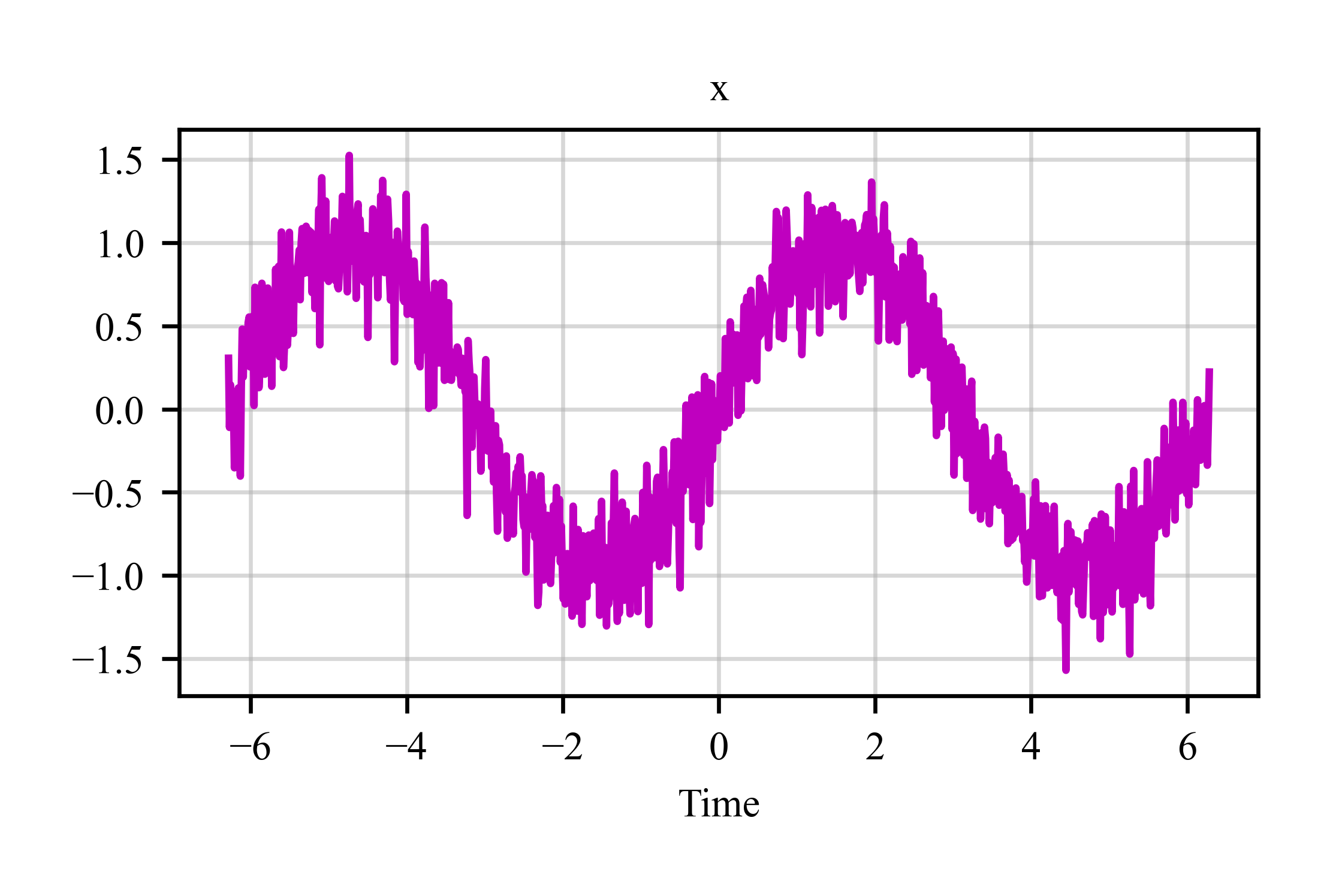
Dark mode off:
>>> s = c4d.state(x = 0) >>> s.xstd = 0.2 >>> for t in np.linspace(-2 * c4d.pi, 2 * c4d.pi, 1000): ... s.x = c4d.sin(t) + np.random.randn() * s.xstd ... s.store(t) >>> s.plot('x', darkmode = False) >>> plt.show()
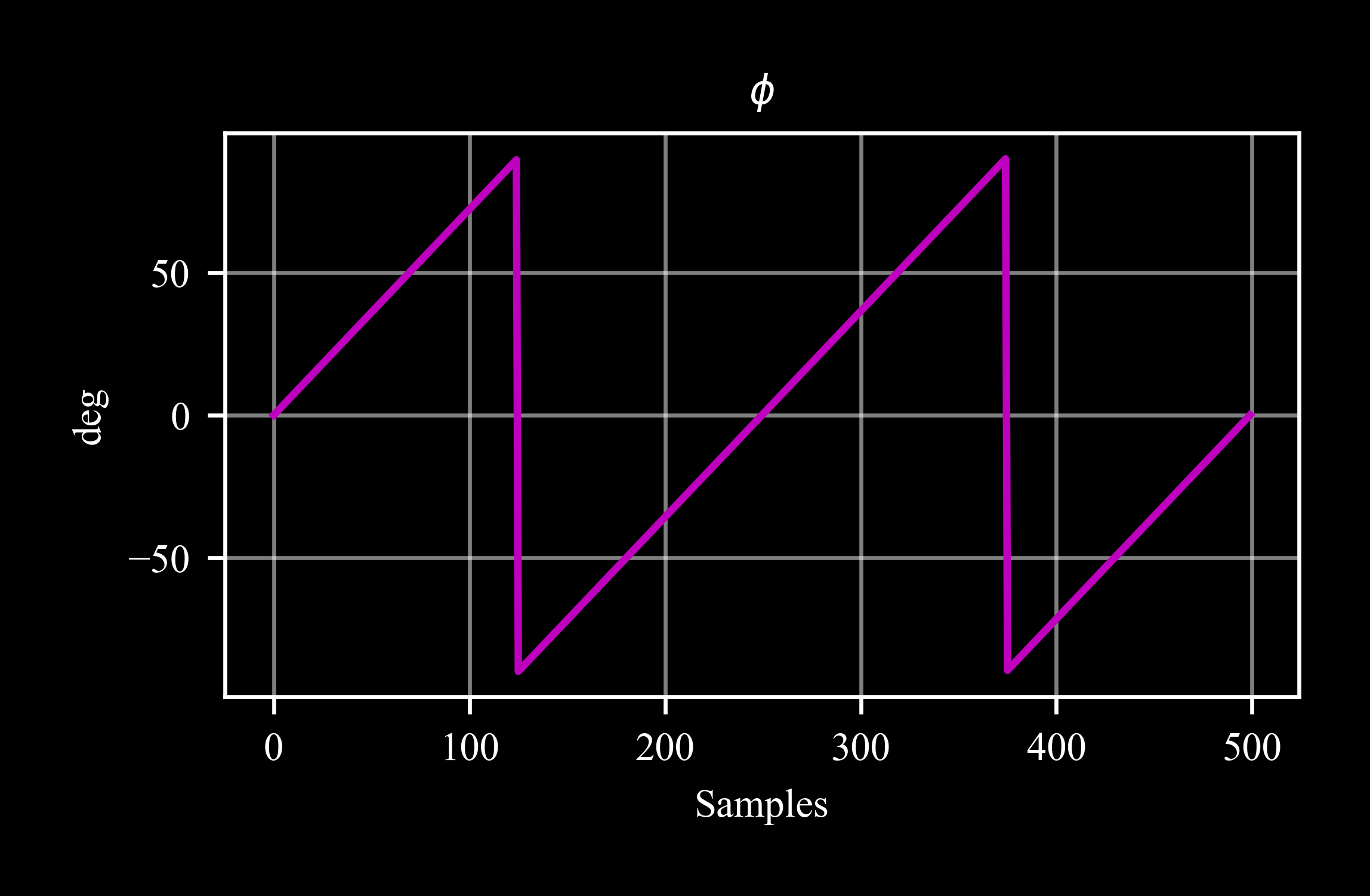
Scale plot:
>>> s = c4d.state(phi = 0) >>> for y in c4d.tan(np.linspace(-c4d.pi, c4d.pi, 500)): ... s.phi = c4d.atan(y) ... s.store() >>> s.plot('phi', scale = c4d.r2d) >>> plt.gca().set_ylabel('deg') >>> plt.show()
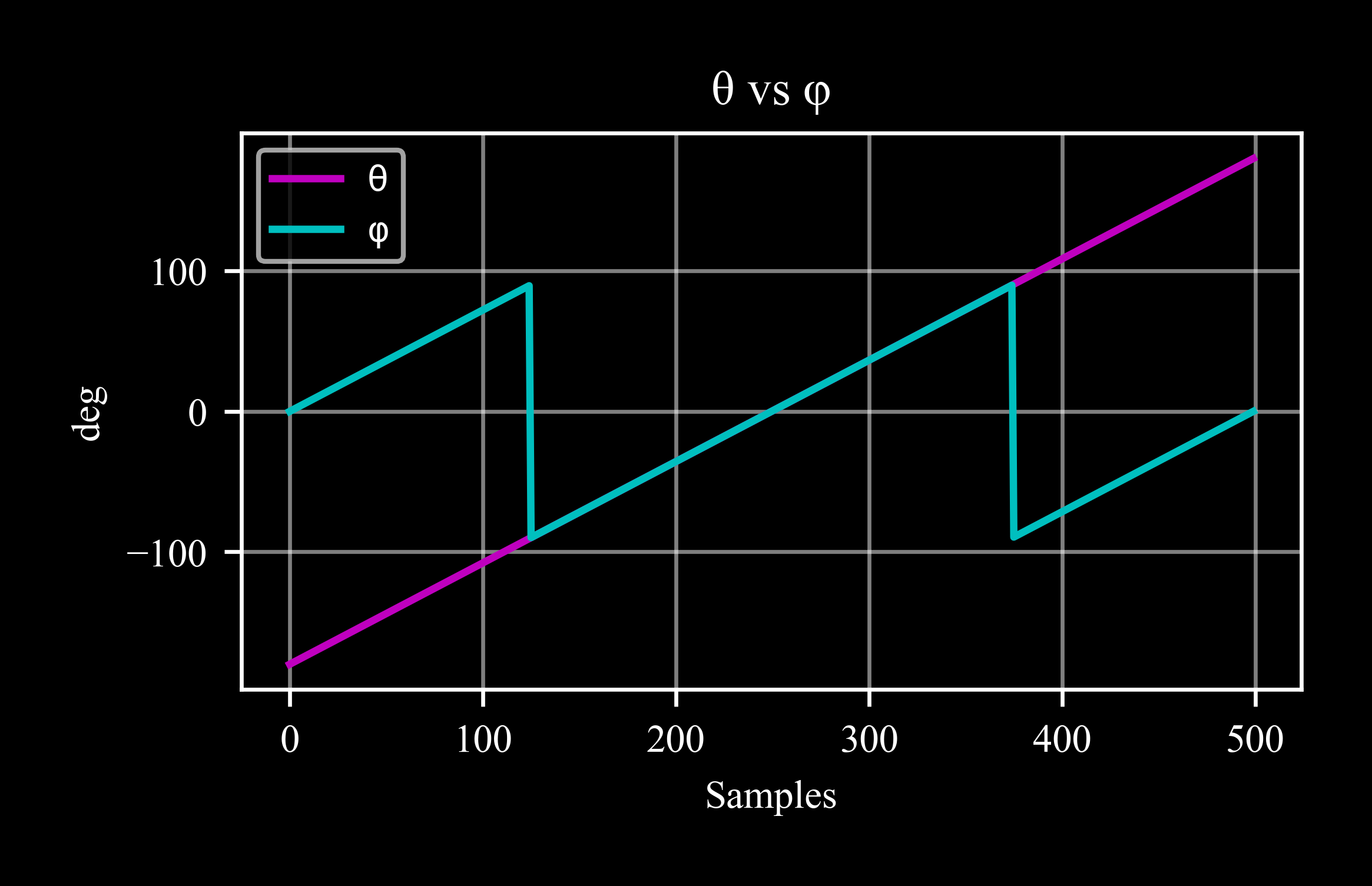
Given axis:
>>> plt.subplots(1, 1) >>> plt.plot(np.linspace(-c4d.pi, c4d.pi, 500) * c4d.r2d, 'm') >>> s.plot('phi', scale = c4d.r2d, ax = plt.gca(), color = 'c') >>> plt.gca().set_ylabel('deg') >>> plt.legend(['θ', 'φ']) >>> plt.show()
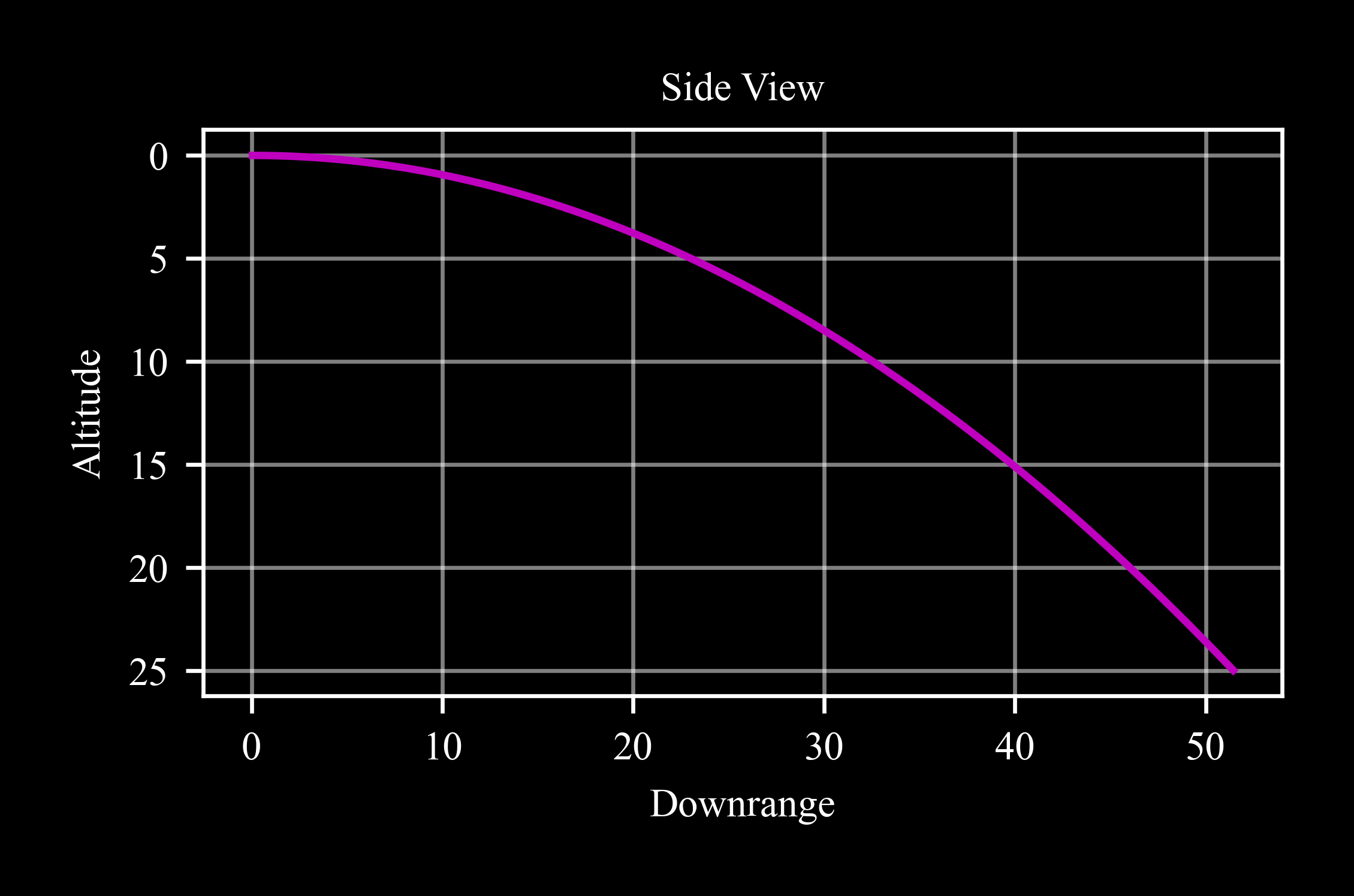
Top view + side view - options of
datapointandrigidbodyobjects:>>> dt = 0.01 >>> floating_balloon = c4d.datapoint(vx = 10 * c4d.k2ms) >>> floating_balloon.mass = 0.1 >>> for t in np.arange(0, 10, dt): ... floating_balloon.inteqm(forces = [0, 0, .05], dt = dt) ... floating_balloon.store(t) >>> floating_balloon.plot('side') >>> plt.gca().invert_yaxis() >>> plt.show()