To download this notebook, click the download icon in the toolbar above and select the .ipynb format.
For any questions or comments, please open an issue on the c4dynamics issues page.
Ballistic Coefficient Estimation - Extended Kalman Filter#
An estimatation of the ballistic coefficient of a target in a free fall tracked by a noisy altimeter radar.
Priliminary Remarks#
The mathematical background required for understanding the Extended Kalman Filter and the form of implementation used by
c4dynamicsis found in the introduction page to the filters module documentary.The
ekfclass API is found here.Zarchan
[1]provides a great deal of detail about this example. Additional sources can be found in[2].
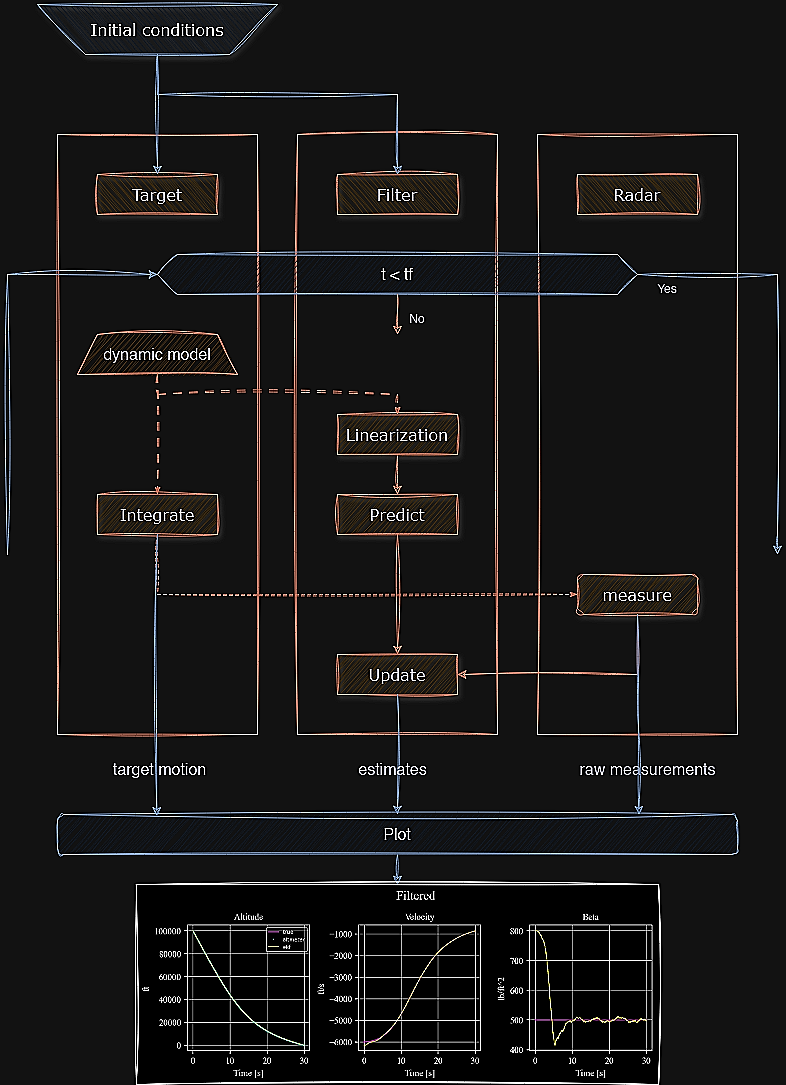
Figure 1: Flowchart of the simulation. The target dynamics uses as a reference to the Kalman prediction and the radar measurements correct the estimates. When the loop is over, all the data is transmitted outside to plot results.
Extended Kalman Filter (EKF)#
The basics of EKF were covered in the filters introduction to provide the background material required for the understanding and developing state estimation for nonlinear systems. Here is a brief recap:
A linear Kalman filter (kalman) should be the first choice when designing a state observer. However, when a nominal trajectory cannot be found, the solution is to linearize the system at each cycle about the current estimated state (that is what the EKF does).
The linearization is required for the iterative solution to the algebraic Riccati equation. The Riccati equation is using to calculate Kalman gain and the optimal covariance matrix.
Similarly to the linear Kalman filter, a good approach to design an extended Kalman filter is to separate it to two steps: predict and update (correct).
The calculation of the state vector both in the predict step (projection in time using the process equations) and in the update step (correction using the measure equations) does not have to use the approximated linear expressions and can use the exact nonlinear equations.
Setup#
[1]:
import c4dynamics as c4d
from scipy.integrate import odeint
import numpy as np
[2]:
dt, tf = .01, 30
tspan = np.arange(0, tf + dt, dt)
dtsensor = 0.05
rho0, k = 0.0034, 22000
Dynamics [1]#
The estimation of the ballistic coefficient requires simulating the target. This involves determining parameters and modeling its dynamics, i.e. the equations of motion.
When a ballistic target re-enters the atmosphere after having traveled a long distance, its speed is high and the remaining time to ground impact is relatively short.
The small distances traveled by ballistic targets after they re-enter the atmosphere enable to accurately model these threats using the flat-Earth, constant gravity approximation.
In this model, only drag and gravity act on the ballistic target.
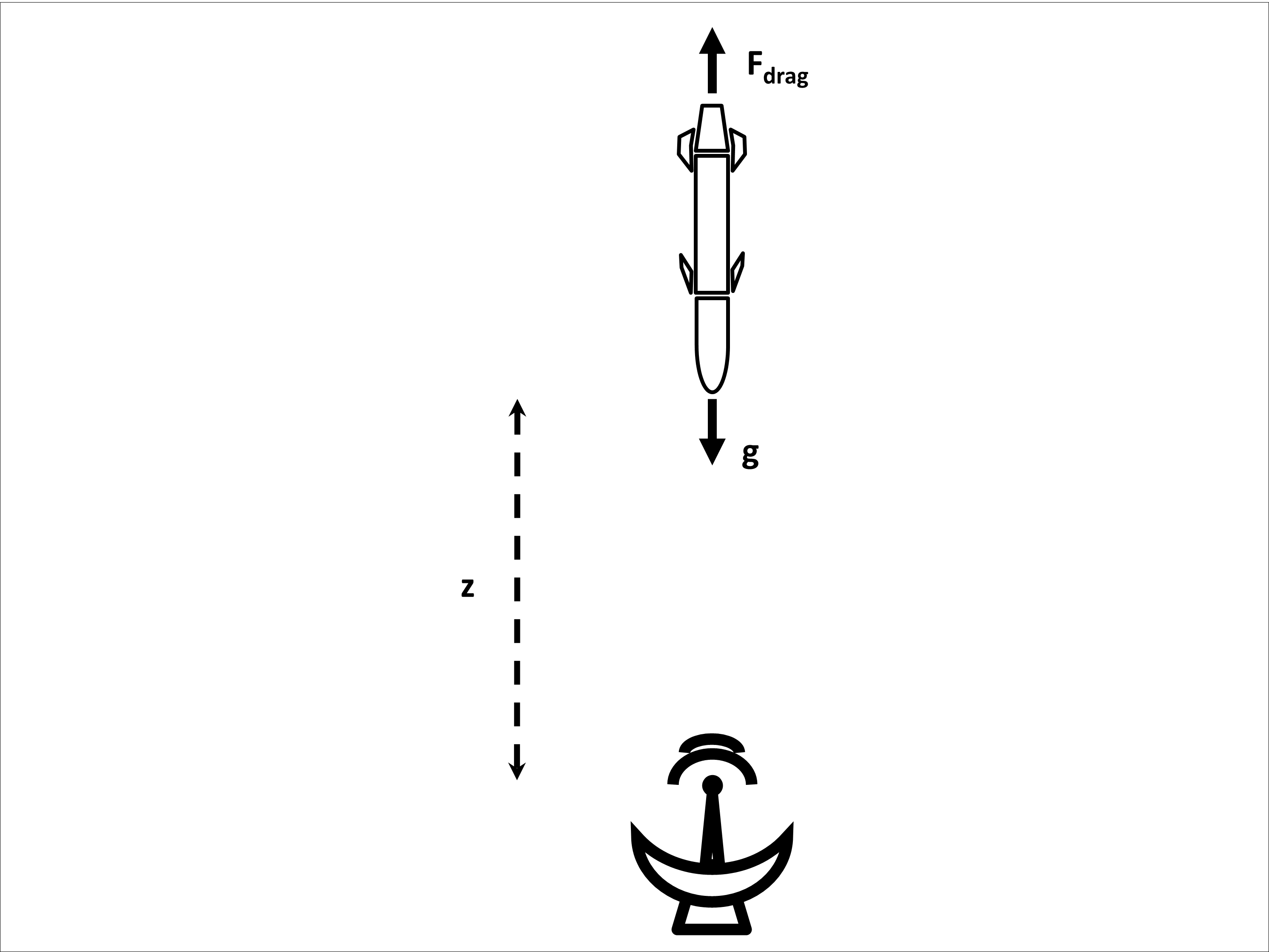
Figure 2: A radar tracking the distance of a ballistic target in the altitude direction
The acceleration components of the ballistic target in the altitude direction can either be expressed in terms of the target weight \(W\), reference area \(s_{ref}\), zero lift drag \(C_{d_0}\), and gravity \(g\), or more simply in terms of the ballistic coefficient \(\beta\) according to
Where \(Q\) is the dynamic pressure = \(0.5⋅\rho⋅v^2\), with air density \(\rho\) given by the approximated term:
Since the acceleration equation is in inertial frame it can be integrated directly to yield velocity and position.
Let the state vector include the target altitude, vertical velocity, and ballistic coefficient:
The above acceleration term leads to the set of ordinary differential equations describing the system:
With output measure:
Where:
\(z\) is the target altitude (\(ft\))
\(v_z\) is the target vertical velocity (\(ft/s\))
\(\beta\) is the target ballistic coefficient (\(lb/ft^2\))
\(y\) is the system output
\(\omega_{\beta} \sim (0, 300)\), the uncertainty in the ballistic coefficient behavior
\(\nu_k \sim (0, 500)\), the measurement noise
\(g = 32.2 ft/s^2\), the gravitational constant
\(\rho_{0} = 0.0034\)
\(k = 22,000\)
In the form of ODE function, these equations are given in the ballistic function:
[3]:
def ballistics(y, t):
z, vz, beta = y
z_dot = vz
vz_dot = rho0 * np.exp(-z / k) * vz**2 * c4d.g_fts2 / 2 / beta - c4d.g_fts2
beta_dot = 0
return [z_dot, vz_dot, beta_dot]
g_fts2 is the gravity constant in foot per seconds squared.
\(1^{st}\) Case: Ideal Radar#
Let’s start with a simple measure of the target position where no errors or uncertainties are present. The state variables are taken from the ground truth simulation without running an estimation.
Setup & Initial Conditions#
[5]:
tgt = c4d.state(z = 100000., vz = -6000., beta = 500.)
altmtr = c4d.sensors.radar(isideal = True, dt = dt)
Main Loop#
The main loop in the ideal case does three things:
Stores the current state
Integrates the system equations of motion
Samples the radar
[6]:
for t in tspan:
tgt.store(t)
tgt.X = odeint(ballistics, tgt.X, [t, t + dt])[-1]
_, _, z = altmtr.measure(tgt, t = t, store = True)
Plotting#
Let’s write a plotting function to draw the results in the ideal case as well as in later cases.
The parameters of the function drawekf() enable to control the elements of the components to draw:
ekf: estimated objecttrueobj: ground truth reference to the estimationmeasure: the raw samples of the sensorstd: the square root of the covariance matrix \(P\), representing one standard deviation of the estimation error
Each subplot calls plotdefaults() from c4dynamics utils to set default properties for an axis.
[7]:
from matplotlib import pyplot as plt
plt.style.use('dark_background')
def drawekf(ekf = None, trueobj = None, measures = None, std = False, title = '', txtcaption = None):
fig, ax = plt.subplots(1, 3, dpi = 200, figsize = (9, 3)
, gridspec_kw = {'left': .15, 'right': .95
, 'top': .80, 'bottom': .15
, 'hspace': 0.5, 'wspace': 0.4})
fig.suptitle(' ' + title, fontsize = 14, fontname = 'Times New Roman')
plt.subplots_adjust(top = 0.95)
''' altitude '''
if trueobj:
ax[0].plot(*trueobj.data('z'), 'm', linewidth = 1.2, label = 'true')
if measures:
ax[0].plot(*measures.data('range'), '.c', markersize = 1, label = 'altmeter')
if ekf:
ax[0].plot(*ekf.data('z'), linewidth = 1, color = 'y', label = 'ekf')
if std:
x = ekf.data('z')[1]
t_sig, x_sig = ekf.data('P00')
# ±std
ax[0].plot(t_sig, x + np.sqrt(x_sig.squeeze()), linewidth = 1, color = 'w', label = 'std') # np.array(v.color) / 255)
ax[0].plot(t_sig, x - np.sqrt(x_sig.squeeze()), linewidth = 1, color = 'w') # np.array(v.color) / 255)
c4d.plotdefaults(ax[0], 'Altitude', 'Time [s]', 'ft', 10)
ax[0].legend(fontsize = 'xx-small', facecolor = None, framealpha = .5)
''' velocity '''
if trueobj:
ax[1].plot(*trueobj.data('vz'), 'm', linewidth = 1.2, label = 'true')
if ekf:
ax[1].plot(*ekf.data('vz'), linewidth = 1, color = 'y', label = 'ekf')
if std:
x = ekf.data('vz')[1]
t_sig, x_sig = ekf.data('P11')
# ±std
ax[1].plot(t_sig, (x + np.sqrt(x_sig.squeeze())), linewidth = 1, color = 'w', label = 'std') # np.array(v.color) / 255)
ax[1].plot(t_sig, (x - np.sqrt(x_sig.squeeze())), linewidth = 1, color = 'w') # np.array(v.color) / 255)
c4d.plotdefaults(ax[1], 'Velocity', 'Time [s]', 'ft/s', 10)
''' ballistic coefficient '''
if trueobj:
ax[2].plot(*trueobj.data('beta'), 'm', linewidth = 1.2, label = 'true') # label = r'$\gamma$') #'\\gamma') #
if ekf:
ax[2].plot(*ekf.data('beta'), linewidth = 1, color = 'y', label = 'ekf')
if std:
x = ekf.data('beta')[1]
t_sig, x_sig = ekf.data('P22')
# ±std
ax[2].plot(t_sig, (x + np.sqrt(x_sig.squeeze())), linewidth = 1, color = 'w', label = 'std') # np.array(v.color) / 255)
ax[2].plot(t_sig, (x - np.sqrt(x_sig.squeeze())), linewidth = 1, color = 'w') # np.array(v.color) / 255)
c4d.plotdefaults(ax[2], 'Beta', 'Time [s]', 'lb/ft^2', 10)
if txtcaption:
fig.add_artist(plt.Line2D([0.15, .85], [-0.05, -0.05], transform = fig.transFigure, color = "red", linewidth = .5, linestyle = "--",))
plt.figtext(0.5, -0.15, txtcaption, wrap = True, horizontalalignment = 'center', fontsize = 10);
return ax
Now we can call drawekf() to plot the results of the ideal case:
[8]:
drawekf(trueobj = tgt, measures = altmtr, title = 'Ideal', txtcaption = "Figure 3: Time histories of the target altitude, velocity, and ballistic coefficient.\nMagenta = true target, cyan = radar samples.");
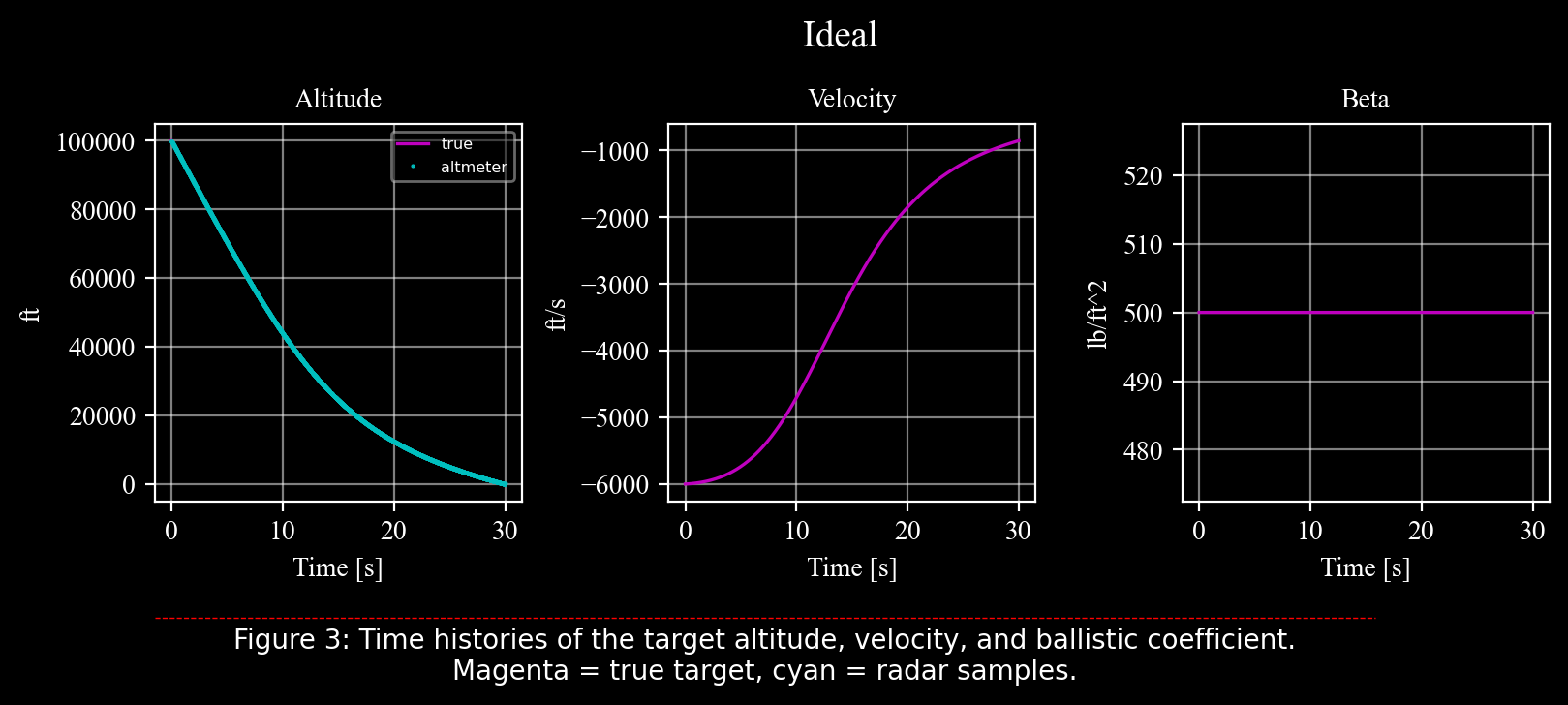
The magenta lines represent the true target properties while the cyan dots stand for the radar samples (the radar measures only the position). The ideal nature of the system is manifested by the exact location of the samples on the true position.
\(2^{nd}\) Case: Noisy Radar#
Before running the filter, let’s ovserve the radar measurements in the presence of realistic parameters.
The parameter \(\nu = \sqrt{500}\) (\(\nu\) is nu) represents one standard deviation of the noise, i.e. the radar noise is a white noise with mean \(0\) and standard deviation \(\sqrt{500}\).
In addition, the sample rate is changed from the previous \(10ms\) to a lower rate of \(50ms\).
Setup & Initial Conditions#
[9]:
nu = np.sqrt(500)
tgt = c4d.state(z = 100000., vz = -6000., beta = 500.)
altmtr = c4d.sensors.radar(rng_noise_std = nu, dt = dtsensor)
Main Loop#
[10]:
for t in tspan:
tgt.store(t)
tgt.X = odeint(ballistics, tgt.X, [t, t + dt])[-1]
altmtr.measure(tgt, t = t, store = True)
Results#
[11]:
ax = drawekf(trueobj = tgt, measures = altmtr, title = 'Noisy', txtcaption = "Figure 4: Time histories of the target altitude, velocity, and ballistic coefficient.\nMagenta = true target, cyan = samples by nonideal radar.")
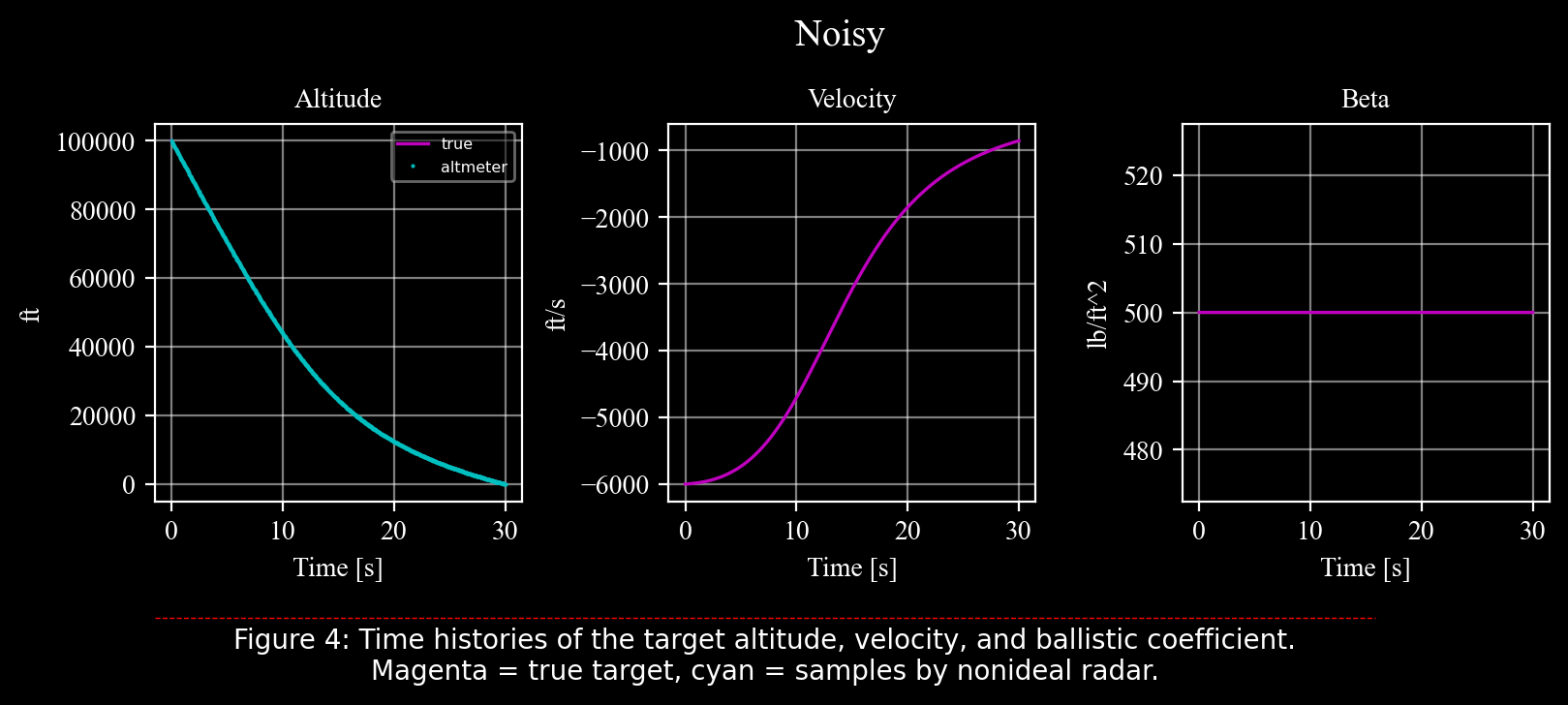
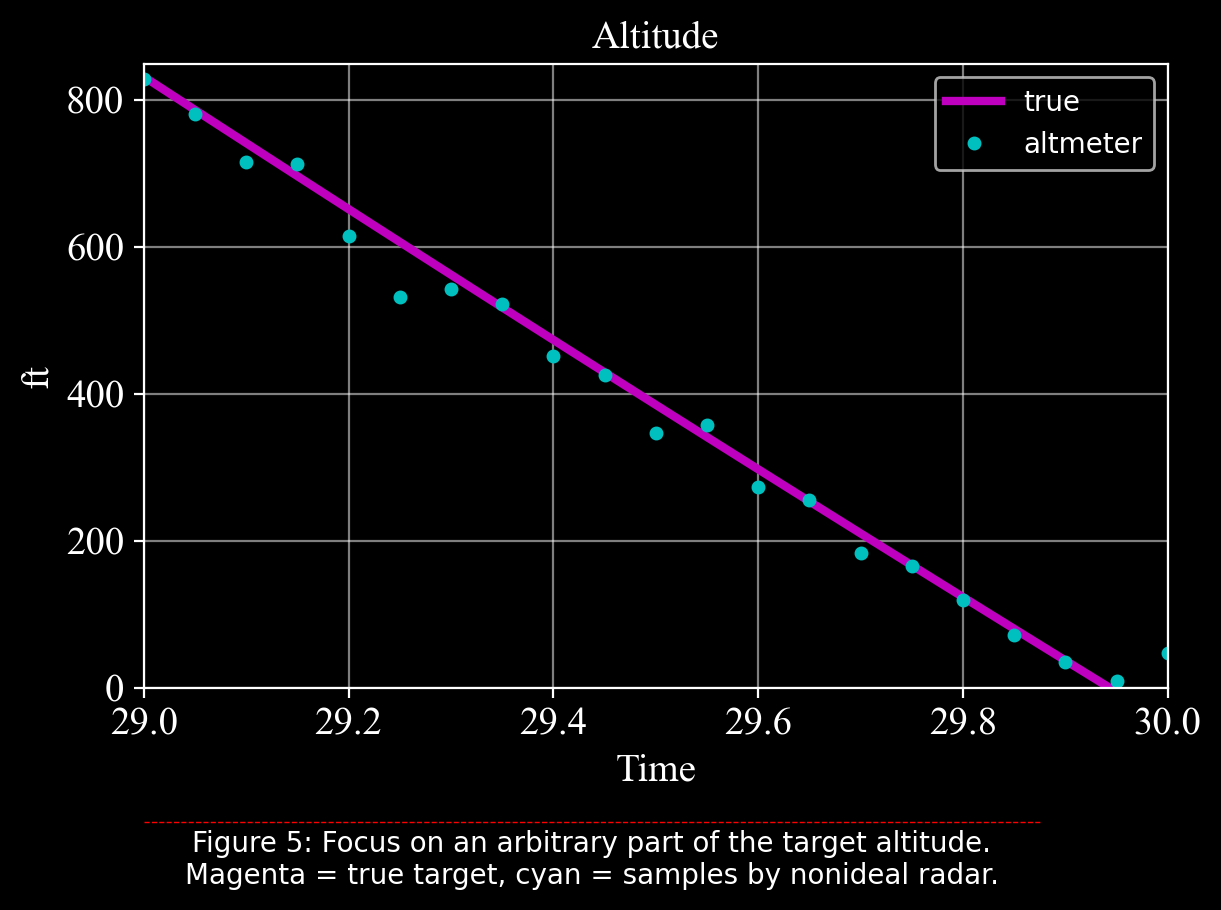
To observe the effect of the radar’s realistic parameters, we need to focus on a small range of the altitude axis:
[12]:
_, ax = plt.subplots(1, 1, dpi = 200, gridspec_kw = {'left': .15, 'right': .95, 'top': .80, 'bottom': .15})
ax.plot(*tgt.data('z'), 'm', linewidth = 3, label = 'true')
ax.plot(*altmtr.data('range'), '.c', markersize = 8, label = 'altmeter')
ax.axis((29, 30, 0, 850))
c4d.plotdefaults(ax, 'Altitude', 'Time', 'ft', 14)
ax.legend()
plt.gcf().add_artist(plt.Line2D([0.15, .85], [0.01, 0.01], transform = plt.gcf().transFigure, color = "red", linewidth = .5, linestyle = "--",))
plt.figtext(0.5, -0.05, "Figure 5: Focus on an arbitrary part of the target altitude.\n"
"Magenta = true target, cyan = samples by nonideal radar."
, wrap = True, horizontalalignment = 'center', fontsize = 10);
dt = 50ms.\(3^{rd}\) Case: Filterring#
Let us examine the capability of the ekf to estimate the system state, including the ballistic coefficient \(\beta\).
First, consider the following key points:
In our problem, only the process equations are nonlinear, but the measurement equations are linear (the radar actually measures the altitude directly).
The covariance matrices \(Q\) and \(R\) which represent the uncertainties in the process and the measurement respectively, are time invariant.
Consequently, initializing and operating the filter involves the following steps:
Initialize the filter with initial conditions, covariance matrices \(Q\) and \(R\), and the measurement matrix \(H\).
Find expression to the process equations Jacobian matrix.
Run the main loop:
Before each call to
predict(), evaluate the linearized process using the Jacobian matrix.Correct the estimate with the radar measurements.
Initial Conditions#
Since the initial conditions are not precisely known, let us define the following errors:
[13]:
zerr = 25 # initial error in position
vzerr = -150 # initial error in velocity
betaerr = 300 # initial error in ballistic coefficient
System Matrices#
predict(), as discussed below.[14]:
H = [1, 0, 0]
[15]:
P0 = np.diag([nu**2, vzerr**2, betaerr**2])
Noise Covariances (Q, R)#
The measurement noise is characterized by \(\nu = \sqrt{500}\):
[16]:
R = nu**2 / dt
Q = np.diag([0, 0, betaerr**2 / tf * dt])
Setup#
ekf object begins with a dictionary \(X\) containing the state variables and their initial conditions.[17]:
tgt = c4d.state(z = 100000., vz = -6000., beta = 500.)
altmtr = c4d.sensors.radar(rng_noise_std = nu, dt = dtsensor)
''' Extended Kalman filter initialization '''
ekf = c4d.filters.ekf(X = {'z': tgt.z + zerr, 'vz': tgt.vz + vzerr
, 'beta': tgt.beta + betaerr}
, P0 = P0, H = H, Q = Q, R = R)
Main Loop#
Since the process is nonlinear (which is the primary reason for EKF over a linear Kalman), the process equations must be linearized in each cycle around the current estimated state. To do that, we need to find an analytic expression of the nonlinear equations Jacobian, which happens to be:
Where:
Finally, the discrete form of the process matrix is:
Where \(I\) is the identity matrix and \(dt\) is the discretization step size.
Note that although the process is linearized, the nonlinear equations are still passed to the predict() function to integrate the derivatives using their exact expressions.
All the steps described earlier appear in the following main loop with a comment line entitling every section:
[18]:
for t in tspan:
# store states
tgt.store(t)
ekf.store(t)
# target motion simulation
tgt.X = odeint(ballistics, tgt.X, [t, t + dt])[-1]
# process linearization
rhoexp = rho0 * np.exp(-ekf.z / k) * c4d.g_fts2 * ekf.vz / ekf.beta
fx = [ekf.vz, rhoexp * ekf.vz / 2 - c4d.g_fts2, 0]
f2i = rhoexp * np.array([-ekf.vz / 2 / k, 1, -ekf.vz / 2 / ekf.beta])
# discretization
F = np.array([[0, 1, 0], f2i, [0, 0, 0]]) * dt + np.eye(3)
# ekf predict
ekf.predict(F = F, fx = fx, dt = dt)
# take a measure
_, _, Z = altmtr.measure(tgt, t = t, store = True)
if Z is not None:
# ekf update
ekf.update(Z)
Results#
[19]:
drawekf(trueobj = tgt, measures = altmtr, ekf = ekf, title = 'Filtered', txtcaption = "Figure 6: Extended Kalman filter estimation of target position, velocity, and ballistic coefficient.\nMagenta = true target, cyan = samples by nonideal radar, yellow = estimated target.");
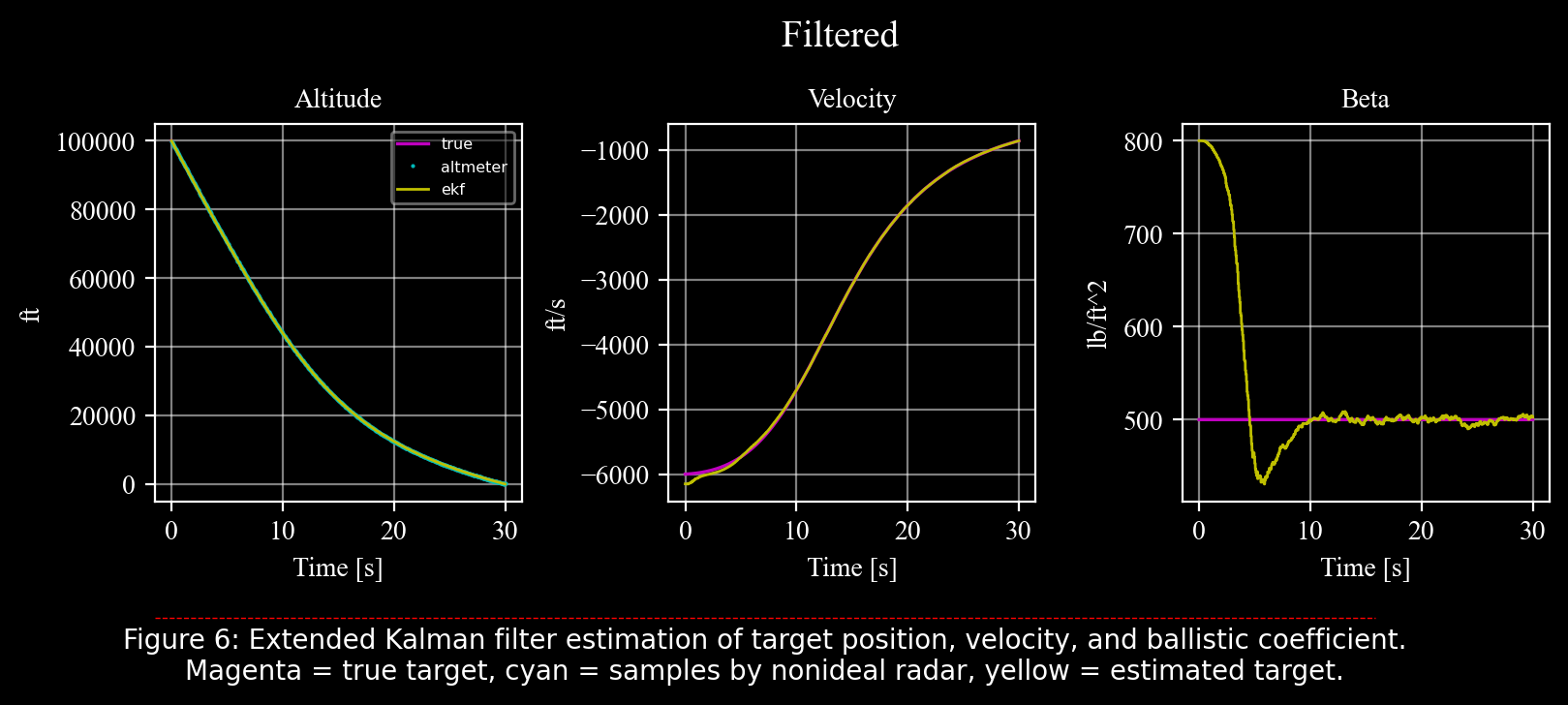
The position and velocity estimates are straightforward. The velocity estimation starts with an error of \(−150 ft/s\), as defined, and quickly converges to the true target velocity. The ballistic coefficient estimation begins with a relatively large error but converges to the true value after an initial overshoot.
The improvement at later times corresponds to a descent in altitude. It occurs at approximately \(60 kft\) altitude, below which the extended Kalman filter provides an excellent estimate of the target’s ballistic coefficient. For initial altitudes higher than \(100 kft\), however, the EKF may struggle to achieve similar results. The ballistic coefficient is not observable, from position measurements alone, at high altitudes due to the absence of significant drag forces.
[ ]:
drawekf(trueobj = tgt, measures = altmtr, ekf = ekf, title = 'Filtered', std = True, txtcaption = "Figure 7: Focus on an arbitrary part of the target altitude.\nMagenta = true target, cyan = samples by nonideal radar, yellow = estimated target.");
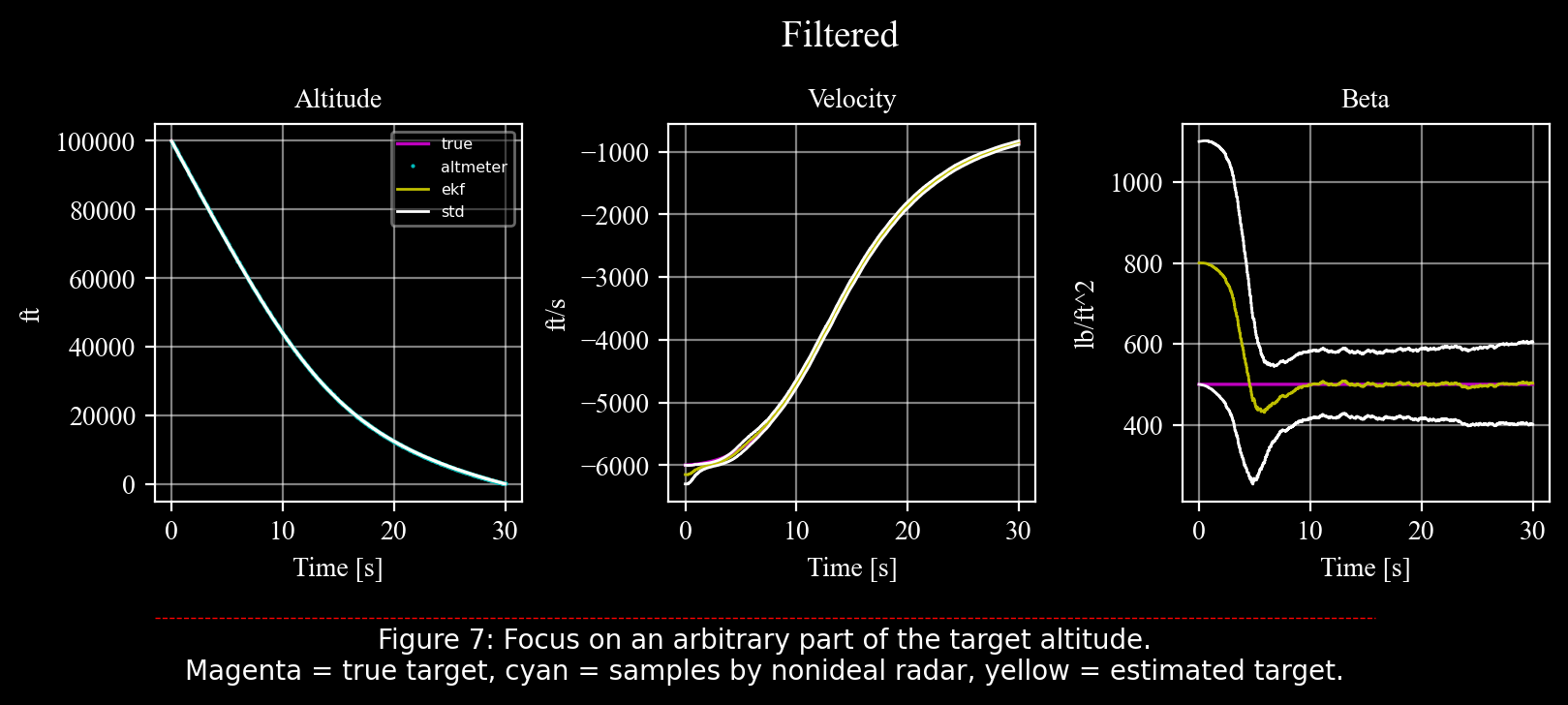
Figure 7 compares the actual error (the difference between the true target value — magenta — and the estimated target value — yellow) with the theoretical predictions of the covariance matrix (white).
Here, we see that the actual error agrees with the theoretical predictions; that is, the actual errors do not exceed the bounds predicted by the system covariance (\(P\)).
However, one drawback of the extended Kalman filter is the potential discrepancy between the actual errors and the covariance predictions.
Conclusion#
This notebook highlighted the successful estimation of the ballistic coefficient, a critical parameter in the target’s aerodynamics, using the Extended Kalman Filter (EKF).
The EKF’s implementation within the c4dynamics framework proved effective, leveraging its capabilities for flexible state management, system modeling, and process linearization.
The results emphasize the importance of a structured approach to filter design, particularly in understanding the underlying system dynamics and refining noise parameters.
A few steps to consider when designing a Kalman filter:
Spend some time understanding the dynamics. It’s the basis of great filtering.
If the system is nonlinear, identify the nonlinearity; is it in the process? in the measurement? both?
Always prioriorotize linear Kalman. If possible, find a nominal trajectory to linearize the system about.
The major time-consuming activity is researching the balance between the noise matrices \(Q\) and \(R\) \(→\) Plan your time in advance.
Use a framework that provides you with the most flexibility and control.
Make fun!
References#
[1] Zarchan, Paul, Tactical and Strategic Missile Guidance, American Institute of Aeronautics and Astronautics, 1981.
[2] Simon, Dan, Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches, Hoboken: Wiley, 2006.