c4dynamics.states.lib.rigidbody.rigidbody.mass#
- property rigidbody.mass#
Gets and sets the object’s mass.
Default value \(mass = 1\).
- Parameters:
mass (float or int) – Mass of the object.
- Returns:
out (float or int) – A scalar representing the object’s mass.
Example
datapoint
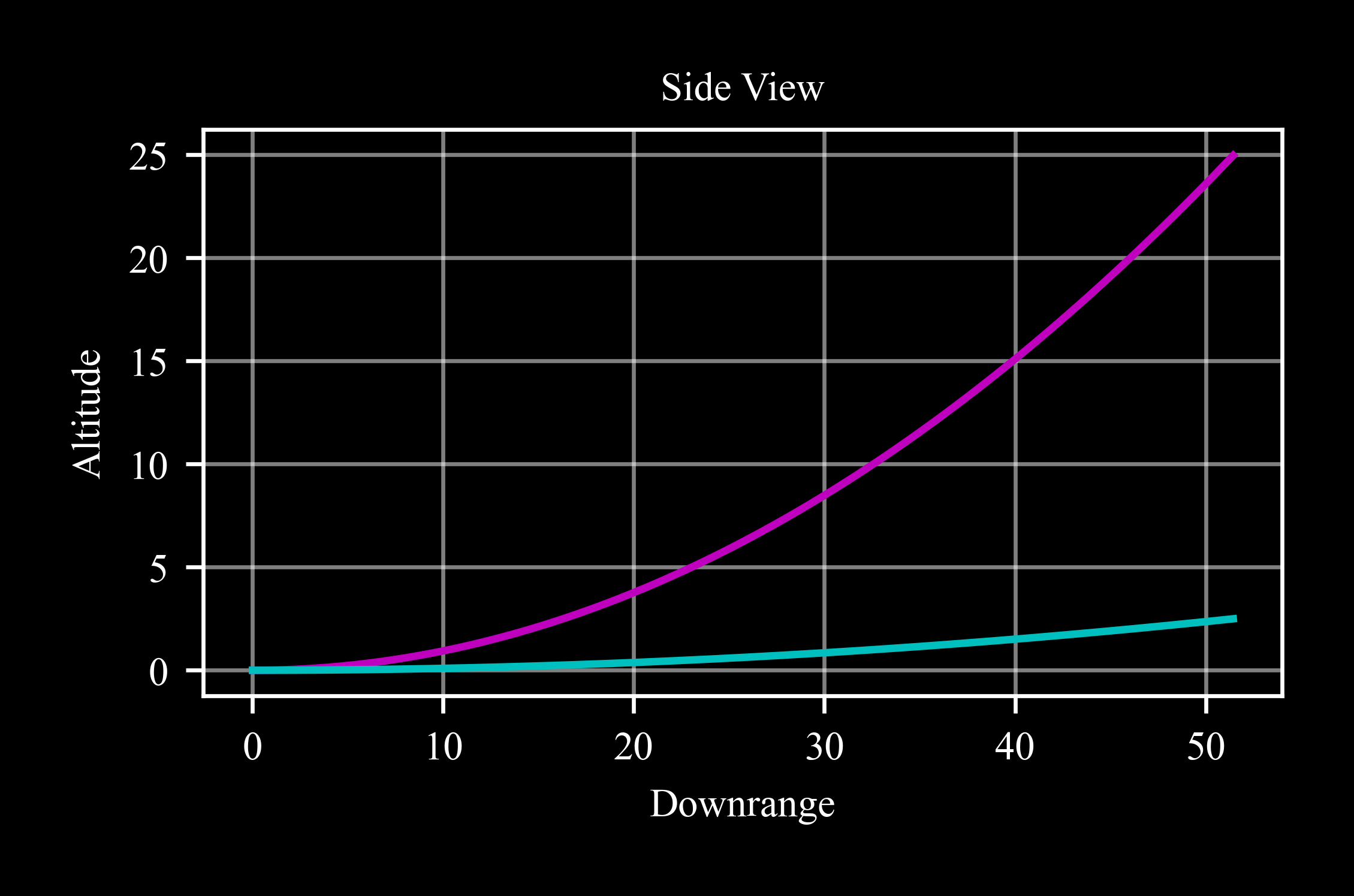
Two floating balloons of 1kg and 10kg float with total force of L = 0.5N and expreience a side wind of 10k.
Import required packages:
>>> import c4dynamics as c4d >>> from matplotlib import pyplot as plt >>> import numpy as np
Settings and initial conditions:
>>> dt = 0.01 >>> tf = 10 + dt >>> F = [0, 0, .5] >>> # >>> bal1 = c4d.datapoint(vx = 10 * c4d.k2ms) >>> bal1.mass = 1 >>> # >>> bal10 = c4d.datapoint(vx = 10 * c4d.k2ms) >>> bal10.mass = 10
Main loop:
>>> for t in np.arange(0, tf, dt): ... bal1.store(t) ... bal10.store(t) ... bal1.X = c4d.eqm.int3(bal1, F, dt) ... bal10.X = c4d.eqm.int3(bal10, F, dt)
>>> bal1.plot('side') >>> bal10.plot('side', ax = plt.gca(), color = 'c')
rigidbody
The previous example for a datapoint object is directly applicable to the rigidbody object, as both classes share the same underlying principles concerning translational dynamics. Simply replace
c4d.datapoint(vx = 10 * c4d.k2ms)withc4d.rigidbody(vx = 10 * c4d.k2ms).