c4dynamics.eqm.derivs.eqm3#
- c4dynamics.eqm.derivs.eqm3(dp: datapoint, F: ndarray | list) ndarray[source]#
Translational motion derivatives.
These equations represent a set of first-order ordinary differential equations (ODEs) that describe the motion of a datapoint in three-dimensional space under the influence of external forces.
- Parameters:
dp (
datapoint) – C4dynamics’ datapoint object for which the equations of motion are calculated.F (array_like) – Force vector \([F_x, F_y, F_z]\)
- Returns:
out (numpy.array) – \([dx, dy, dz, dv_x, dv_y, dv_z]\) 6 derivatives of the equations of motion, 3 position derivatives, and 3 velocity derivatives.
Examples
Import required packages:
>>> import c4dynamics as c4d >>> from matplotlib import pyplot as plt >>> import numpy as np
>>> dp = c4d.datapoint() >>> dp.mass = 10 # mass 10kg >>> F = [0, 0, c4d.g_ms2] # g_ms2 = 9.8m/s^2 >>> c4d.eqm.eqm3(dp, F) array([0 0 0 0 0 0.980665])
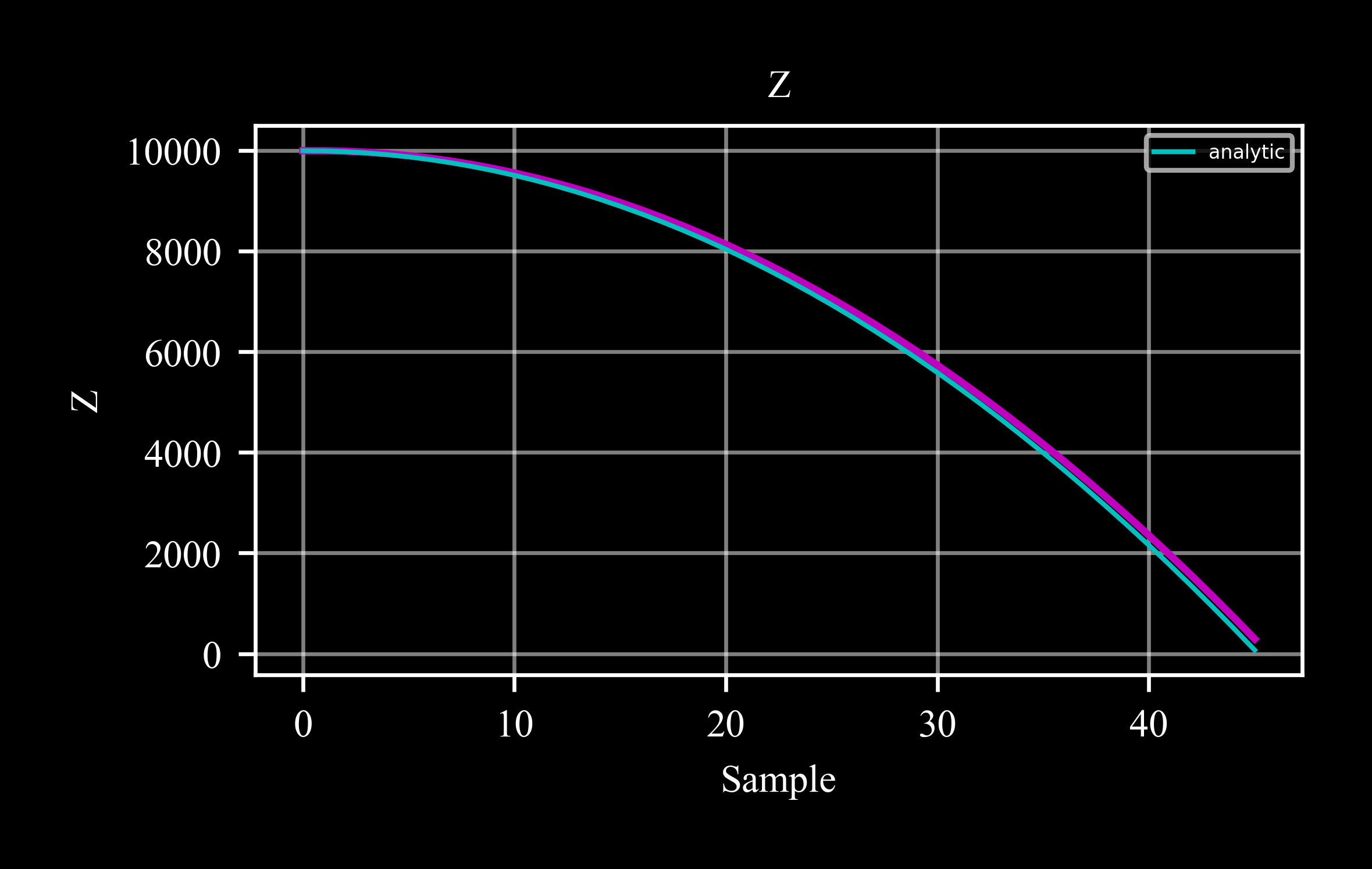
Euler integration on the equations of motion of mass in a free fall:
>>> h0 = 10000 >>> pt = c4d.datapoint(z = 10000) >>> while pt.z > 0: ... pt.store() ... dx = c4d.eqm.eqm3(pt, [0, 0, -c4d.g_ms2]) ... pt.X += dx # (dt = 1) >>> pt.plot('z') >>> # comapre to anayltic solution >>> t = np.arange(len(pt.data('t'))) >>> z = h0 - .5 * c4d.g_ms2 * t**2 >>> plt.gca().plot(t[z > 0], z[z > 0], 'c', linewidth = 1)