
C4DYNAMICS
(Tsipor Dynamics)
Elevating Algorithms
The Python framework for state-space modeling and algorithm development.
c4dynamics is designed to
simplify the development of algorithms for dynamic systems,
using state space representations.
It offers engineers and researchers a systematic approach to model,
simulate, and control systems in fields like robotics,
aerospace, and navigation.
The framework introduces state objects, which are foundational
data structures that encapsulate state vectors and provide
the tools for managing data, simulating system behavior,
and analyzing results.
With integrated modules for sensors, detectors, and filters, c4dynamics accelerates algorithm development while maintaining flexibility and scalability.
Quickstart
pip install c4dynamics
Copy and run the following snippet in a Python script or a Jupyter notebook:
>>> import c4dynamics as c4d
>>> s = c4d.state(y = 1, vy = 0.5) # define object of two variables in the state space (y, vy) with initial conditions.
>>> s.store(t = 0) # store the state
>>> F = [[1, 1], # transition matrix
... [0, 1]]
>>> s.X += F @ s.X # propogate the state through transition matrix
>>> s.store(t = 1) # store the new state
>>> print(s)
[ y vy ]
>>> s.X
[2.5 1]
>>> s.data('y') # extract stored data for the state varable 'y'. other option: s.plot('y')
([0, 1], [1, 2.5])
State Objects
At the core of c4dynamics are state objects — data structures that encapsulate the variables defining a system’s state. State objects offer a clear interface for getting and setting the state vector and performing state space transformations.
For instance, with a state of two variables \(y\) and \(v_y\), a state object s can be defined as follows:
>>> s = c4d.state(y = 1, vy = 0.5)
>>> print(s)
[ y vy ]
The state vector X represents the current snapshot of the system’s state variables:
>>> print(s.X)
[1 0.5]
Use Cases for State Objects:
Researchers and Developers: Working on dynamic systems in control theory, robotics, guidance, etc.
Educators and Learners: Exploring and experimenting with state-based modeling, Kalman filtering, and sensor fusion.
Engineers: Implementing practical applications in navigation, estimation, and control systems.
For more details refer to states.
Workflow
The following flowchart outlining a typical workflow with c4dynamics:
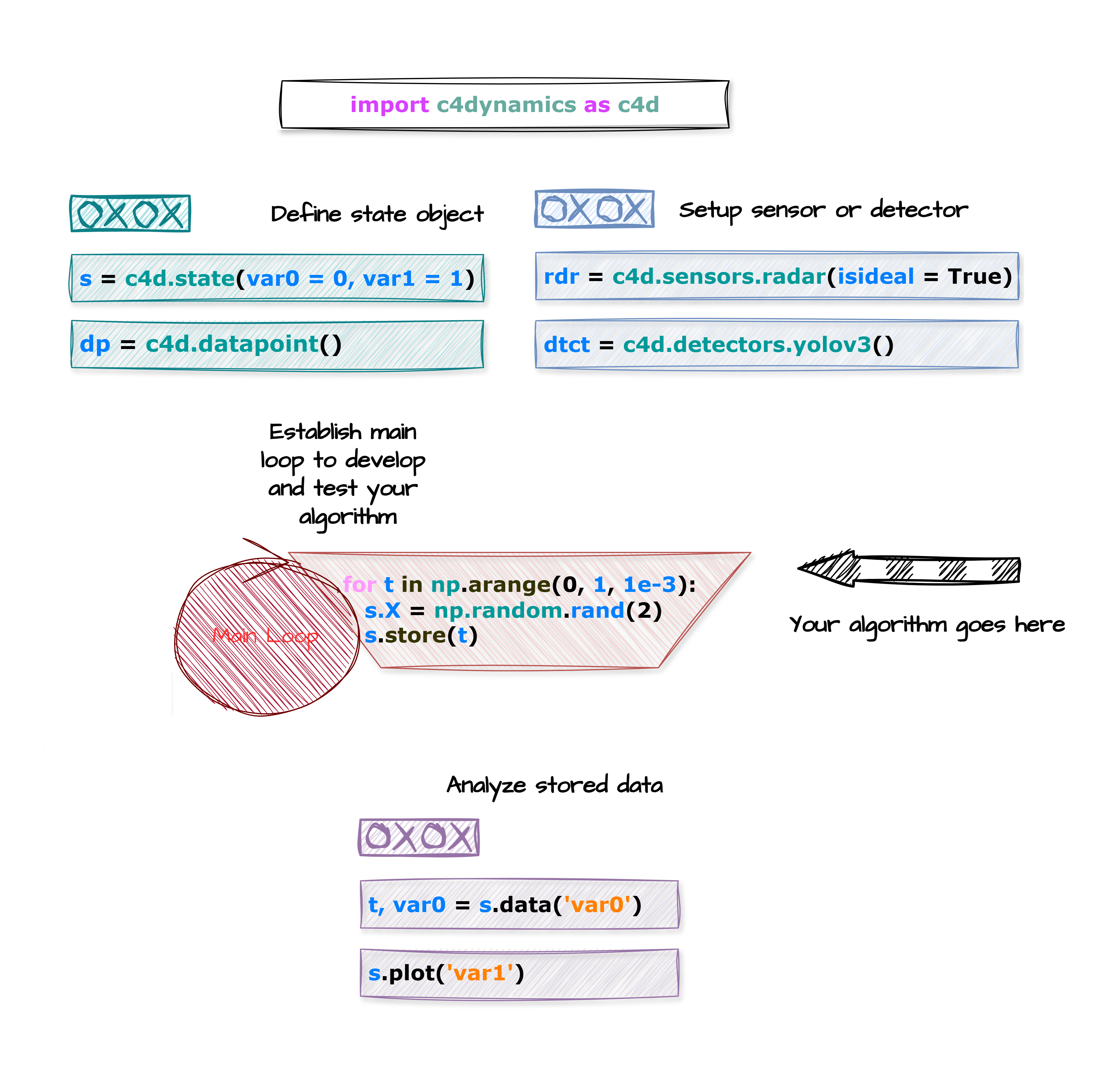
Typical workflow with c4dynamics#
Modules
State Data Structures: Custom and predefined state objects facilitate efficient data management and mathematical operations.
Sensors: Simulate sensor models to provide realistic inputs.
Detectors: API and data structure designed for reading inputs from objects detection models.
Filters: Kalman filters for real-time tracking and prediction.
Utilities: Additional tools for system development and analysis.
Documentation Sections
The documentation is organized as follows:
Installation: Simple instructions for setting up c4dynamics.
Getting Started: An overview of the core concepts and features of c4dynamics, with beginner-friendly examples to help you get started quickly.
Concepts: Detailed explanations of the underlying theories and state-space modeling principles used in c4dynamics, ideal for users who want to deepen their understanding.
Use Cases: Real-world use cases showcasing how c4dynamics can be applied in fields such as robotics, aerospace, and computer vision.
API Reference: Comprehensive documentation for technical users, covering all the classes, functions, and modules available in c4dynamics.