c4dynamics.eqm.integrate.int3#
- c4dynamics.eqm.integrate.int3(dp: datapoint, forces: ndarray | list, dt: float, derivs_out: bool = False) ndarray[tuple[Any, ...], dtype[float64]] | Tuple[ndarray[tuple[Any, ...], dtype[float64]], ndarray[tuple[Any, ...], dtype[float64]]][source]#
A step integration of the equations of translational motion.
This method makes a numerical integration using the fourth-order Runge-Kutta method.
The integrated derivatives are of three dimensional translational motion as given by
eqm3.The result is an integrated state in a single interval of time where the size of the step is determined by the parameter dt.
- Parameters:
dp (
datapoint) – The datapoint which state vector is to be integrated.forces (numpy.array or list) – An external forces array acting on the body.
dt (float) – Time step for integration.
derivs_out (bool, optional) – If true, returns the last three derivatives as an estimation for the acceleration of the datapoint.
- Returns:
X (numpy.float64) – An integrated state.
dxdt4 (numpy.float64, optional) – The last three derivatives of the equations of motion. These derivatives can use as an estimation for the acceleration of the datapoint. Returned if derivs_out is set to True.
Algorithm
The integration steps follow the Runge-Kutta method:
Compute k1 = f(ti, yi)
Compute k2 = f(ti + dt / 2, yi + dt * k1 / 2)
Compute k3 = f(ti + dt / 2, yi + dt * k2 / 2)
Compute k4 = f(ti + dt, yi + dt * k3)
Update yi = yi + dt / 6 * (k1 + 2 * k2 + 2 * k3 + k4)
Examples
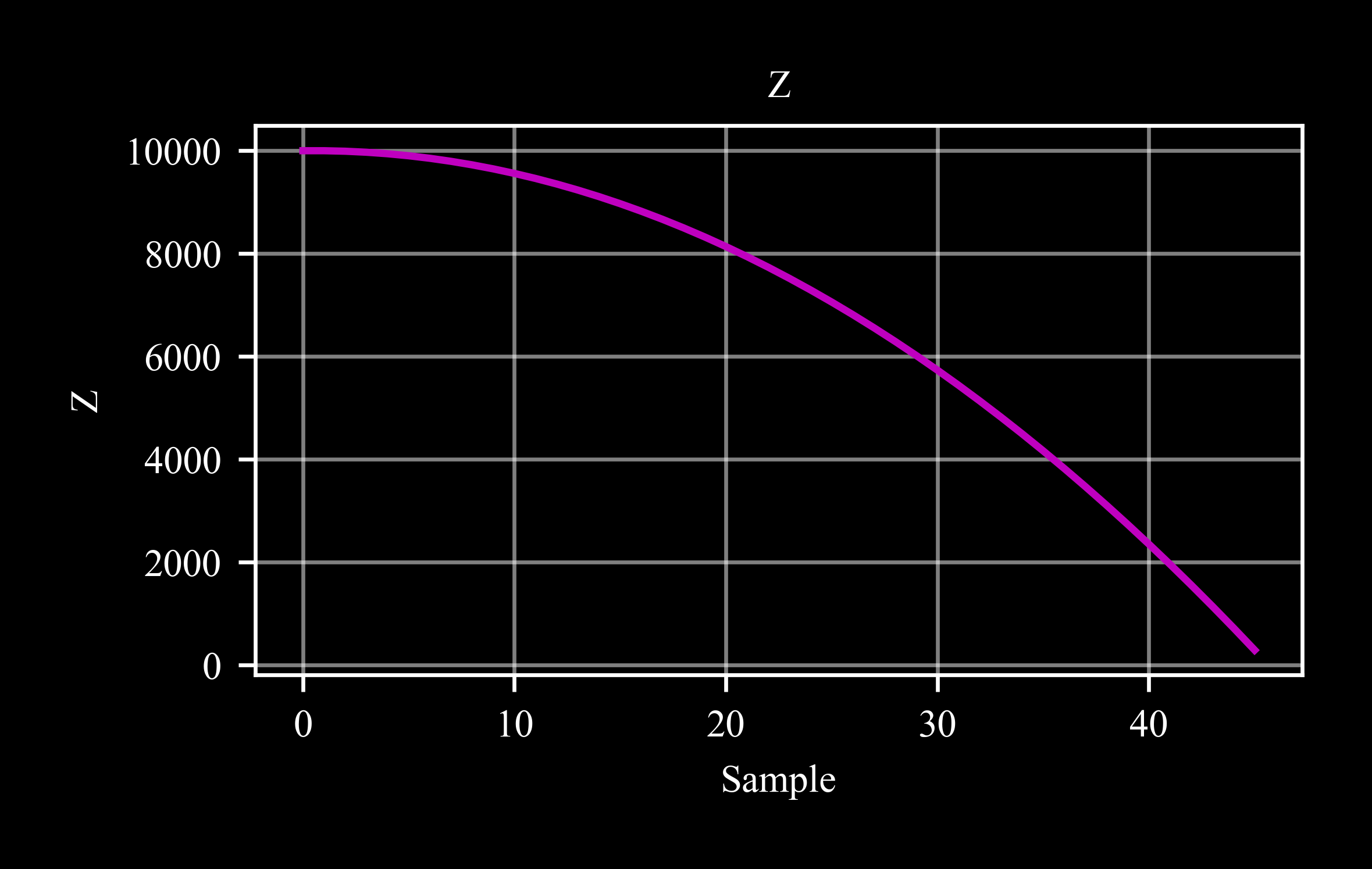
Runge-Kutta integration of the equations of motion on a mass in a free fall (compare to the same example in
eqm3with Euler integration):Import required packages
>>> import c4dynamics as c4d
>>> pt = c4d.datapoint(z = 10000) >>> while pt.z > 0: ... pt.store() ... pt.X = c4d.eqm.int3(pt, [0, 0, -c4d.g_ms2], dt = 1)