c4dynamics.states.lib.datapoint.datapoint.plot#
- datapoint.plot(var, scale=1, ax=None, filename=None, darkmode=True, **kwargs)[source]#
Draws plots of trajectories or variable evolution over time.
var can be each one of the state variables, or top, side, for trajectories.
- Parameters:
var (str) – The variable to be plotted. Possible variables for trajectories: top, side. For time evolution, any one of the state variables is possible: x, y, z, vx, vy, vz - for a datapoint object, and also phi, theta, psi, p, q, r - for a rigidbody object.
scale (float or int, optional) – A scaling factor to apply to the variable values. Defaults to 1.
ax (matplotlib.axes.Axes, optional) – An existing Matplotlib axis to plot on. If None, a new figure and axis will be created. By default None.
filename (str, optional) – Full file name to save the plot image. If None, the plot will not be saved, by default None.
darkmode (bool, optional) – Directory path to save the plot image. If None, the plot will not be saved, by default None.
**kwargs (dict, optional) – Additional key-value arguments passed to matplotlib.pyplot.plot. These can include any keyword arguments accepted by plot, such as color, linestyle, marker, etc.
Notes
The method overrides the
plotof the parentstateobject and is applicable todatapointand its subclassrigidbody.Uses matplotlib for plotting.
Trajectory views (top and side) show the crossrange vs downrange or downrange vs altitude.
Examples
Import necessary packages:
>>> import c4dynamics as c4d >>> from matplotlib import pyplot as plt >>> import numpy as np >>> import scipy
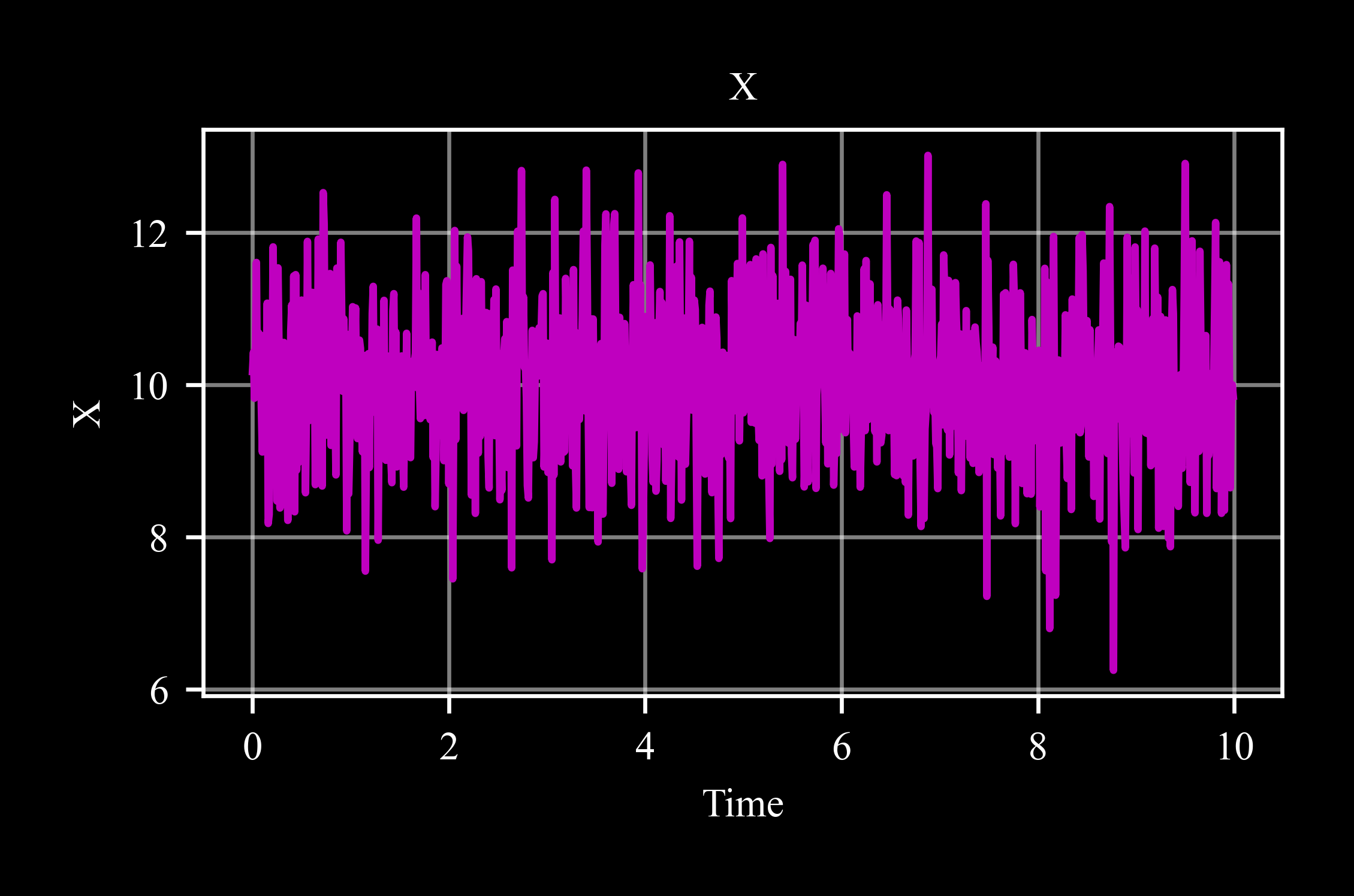
datapoint:
>>> pt = c4d.datapoint() >>> for t in np.arange(0, 10, .01): ... pt.x = 10 + np.random.randn() ... pt.store(t) >>> pt.plot('x')
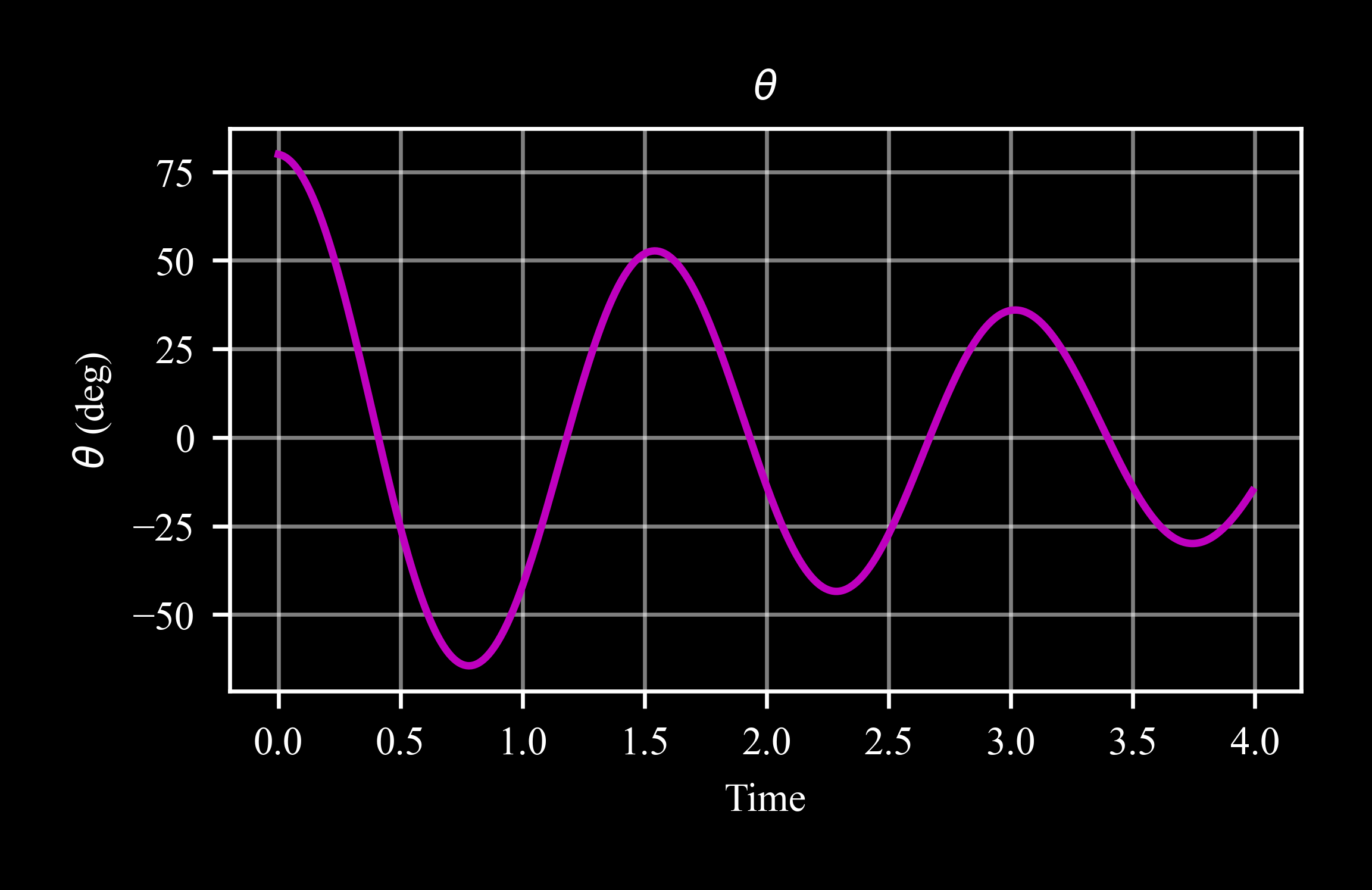
rigidbody:
A physical pendulum is represented by a rigidoby object. scipy’s odeint integrates the equations of motion to simulate the angle of rotation of the pendulum over time.
Settings and initial conditions:
>>> dt =.01 >>> pndlm = c4d.rigidbody(theta = 80 * c4d.d2r) >>> pndlm.I = [0, .5, 0]
Dynamic equations:
>>> def pendulum(yin, t, Iyy): ... yout = np.zeros(12) ... yout[7] = yin[10] ... yout[10] = -c4d.g_ms2 * c4d.sin(yin[7]) / Iyy - .5 * yin[10] ... return yout
Main loop:
>>> for ti in np.arange(0, 4, dt): ... pndlm.X = scipy.integrate.odeint(pendulum, pndlm.X, [ti, ti + dt], (pndlm.I[1],))[1] ... pndlm.store(ti)
Plot results:
>>> pndlm.plot('theta', scale = c4d.r2d)